Device-templated RoPE component. More...
Public Types | |
| using | ComponentBase = Component<TDeviceType, TPrecision> |
| using | MR = typename DeviceTypeTraits<TDeviceType>::memory_resource |
| using | TensorType = Tensor<TPrecision, MR> |
Public Member Functions | |
| Rope (const std::string &name, const RopeConfig &config, std::optional< DeviceId > device_id=std::nullopt) | |
| ~Rope () override=default | |
| std::pair< TensorType &, TensorType & > | backward (TensorType &grad_Q, TensorType &grad_K) |
| Backpropagate gradients through RoPE. | |
| void | decode (TensorType &Q, TensorType &K, int position) |
| Single-token decode with explicit position. | |
| void | forward (TensorType &Q, TensorType &K) |
| Apply rotary position embeddings to Q and K in-place. | |
| DeviceId | getDeviceId () const override |
| Get the compute device id associated with this component. | |
| std::vector< ITensor * > | getGradients () const override |
| Return non-owning pointers to parameter gradient tensors. | |
| MemoryStats | getMemoryStats () const override |
| Return the current memory allocation breakdown for this component. | |
| std::vector< ITensor * > | getParameters () const override |
| Return non-owning pointers to parameter tensors. | |
| const ComponentType | getType () const override |
| Get the component type identifier. | |
| size_t | parameterCount () const override |
| Return number of trainable parameters. | |
| void | prefill (TensorType &Q, TensorType &K, int position_offset) |
| Apply rotary position embeddings with an explicit position offset. | |
| void | save_ (ModelArchive &archive, SerializationMode mode) const override |
| void | synchronize () override |
| Wait for outstanding device work submitted by this component. | |
| std::string | toString () const override |
| Produce a short, human-readable description of the component. | |
| void | zeroGradients () override |
| Clear all model-owned gradients for this component. | |
| Public Member Functions inherited from Mila::Dnn::Component< TDeviceType, TPrecision > | |
| Component (const std::string &name) | |
| Construct component with required name identifier. | |
| virtual | ~Component ()=default |
| virtual void | build (const BuildContext &context) final |
| Build the component with the provided BuildContext (canonical overload). | |
| const std::string | getName () const |
| Get the component's name identifier. | |
| virtual std::vector< std::string > | getParameterNames () const |
| List all available parameter names for this component. | |
| RuntimeMode | getRuntimeMode () const noexcept |
| Convenience accessor — true if currently in Eval mode. | |
| TrainingMode | getTrainingMode () const noexcept |
| The current runtime behavioral mode of this Component. | |
| virtual bool | isBuilt () const final |
| Returns true if build() has completed successfully. | |
| bool | isInferenceMode () const noexcept |
| bool | isTrainingMode () const noexcept |
| virtual void | loadParameter (const std::string &name, const Serialization::ITensorBlob &blob) |
| Load a parameter from serialized tensor data. | |
| void | setTrainingMode (TrainingMode mode) |
| Set the runtime behavioral mode for this Component. | |
Protected Member Functions | |
| void | onBuilding (const BuildContext &build_context) override |
| Hook invoked by build() to allocate component buffers. | |
| void | onExecutionContextSet () override |
| Lifecycle hook: Called immediately after ExecutionContext is set. | |
| void | onTrainingModeChanging (TrainingMode training_mode) override |
| Hook called before TrainingMode transitions. | |
| Protected Member Functions inherited from Mila::Dnn::Component< TDeviceType, TPrecision > | |
| IExecutionContext * | getExecutionContext () const |
| Get the shared execution context. | |
| bool | hasExecutionContext () const noexcept |
| Check if execution context has been set. | |
| template<TensorDataType TParameterPrecision, typename TMemoryResource> | |
| void | loadParameterFromBlob (const std::string ¶m_name, const Serialization::ITensorBlob &blob, Tensor< TParameterPrecision, TMemoryResource > &target, const shape_t &expected_shape) |
| Load a tensor blob into a parameter tensor with validation. | |
| void | setExecutionContext (IExecutionContext *context) |
| Set the execution context for this component. | |
Private Types | |
| using | OpType = typename OperationTraits<OperationType::RopeOp, TDeviceType, TPrecision>::type |
Private Member Functions | |
| void | createOperation () |
| void | validateBuildContext (const BuildContext &context) const |
Private Attributes | |
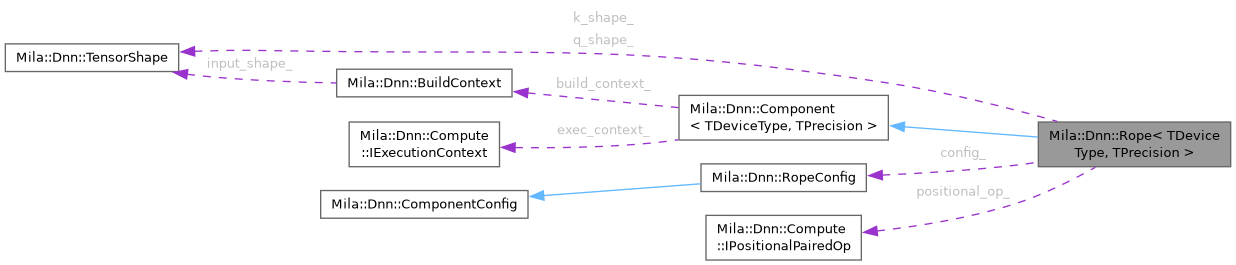
| RopeConfig | config_ |
| shape_t | k_shape_ |
| std::shared_ptr< OpType > | operation_ { nullptr } |
| std::unique_ptr< IExecutionContext > | owned_exec_context_ { nullptr } |
| std::unique_ptr< TensorType > | owned_K_grad_ { nullptr } |
| std::unique_ptr< TensorType > | owned_Q_grad_ { nullptr } |
| IPositionalPairedOp * | positional_op_ { nullptr } |
| shape_t | q_shape_ |
Additional Inherited Members | |
| Static Public Member Functions inherited from Mila::Dnn::Component< TDeviceType, TPrecision > | |
| static constexpr DeviceType | getDeviceType () |
| Compile-time device type for this component instance. | |
| static constexpr TensorDataType | getPrecision () noexcept |
| Compile-time tensor precision for this component instance. | |
| Protected Attributes inherited from Mila::Dnn::Component< TDeviceType, TPrecision > | |
| BuildContext | build_context_ { shape_t{ 1 }, RuntimeMode::Training } |
| The BuildContext stored at build time. | |
Detailed Description
requires PrecisionSupportedOnDevice<TPrecision, TDeviceType>
class Mila::Dnn::Rope< TDeviceType, TPrecision >
Device-templated RoPE component.
Rotates Q and K in-place using a PairedOperation backend registered as "RopeOp". The component owns no forward output buffers — rotation writes directly back into the caller-provided tensors (typically views into a fused QKV projection buffer).
Supports three dispatch modes: forward(Q, K) — training, positions 0..T-1 prefill(Q, K, position_offset) — chunked prefill, positions offset..offset+T-1 decode(Q, K, position) — single-token KV-cache decode
Positional dispatch (prefill/decode) is available when the backend implements IPositionalPairedOp. The interface pointer is cached at operation creation via dynamic_cast.
This component has no trainable parameters.
Constructor & Destructor Documentation
◆ Rope()
|
inlineexplicitexport |
◆ ~Rope()
|
overrideexportdefault |
Member Function Documentation
◆ backward()
|
inlineexport |
Backpropagate gradients through RoPE.
RoPE is an orthogonal rotation (R^T = R^{-1}), so input gradients are the upstream gradients rotated by the transpose (negative) angles.
- Parameters
-
grad_Q Upstream gradient w.r.t. rotated Q. grad_K Upstream gradient w.r.t. rotated K.
- Returns
- Pair of references: (grad_Q_in, grad_K_in).
◆ createOperation()
|
inlineexportprivate |


◆ decode()
|
inlineexport |
Single-token decode with explicit position.
Rotates Q and K in-place using the cos/sin cache row at position. Required for KV-cache autoregressive generation where T=1.
- Parameters
-
Q Query tensor [B, 1, n_heads * head_dim]. Mutated in-place. K Key tensor [B, 1, n_kv_heads * head_dim]. Mutated in-place. position Absolute position of the token in the full sequence.

◆ forward()
|
inlineexport |
Apply rotary position embeddings to Q and K in-place.
Uses implicit positions 0..T-1. Suitable for training forward passes.
- Parameters
-
Q Query tensor [B, T, n_heads * head_dim]. Mutated in-place. K Key tensor [B, T, n_kv_heads * head_dim]. Mutated in-place.

◆ getDeviceId()
|
inlineoverrideexportvirtual |
Get the compute device id associated with this component.
Must return the device on which parameters and operations execute.
Implements Mila::Dnn::Component< TDeviceType, TPrecision >.

◆ getGradients()
|
inlineoverrideexportvirtual |
Return non-owning pointers to parameter gradient tensors.
Only valid when isTraining() is true.
- Exceptions
-
std::runtime_error if called when not in training mode or before the component has been built.
Implements Mila::Dnn::Component< TDeviceType, TPrecision >.
◆ getMemoryStats()
|
inlineoverrideexportvirtual |
Return the current memory allocation breakdown for this component.
Reflects allocations at the moment of the call. The returned stats naturally track the component lifecycle:
After construction — parameters only After build( Inference ) — parameters + T=1 state buffers After build( Training ) — parameters + T=full state buffers After setEvaluation( false ) — parameters + state + gradients
For CompositeComponent and Network, the returned stats are the recursive aggregate of all child components.
May be called at any time — no lifecycle preconditions.
- Returns
- MemoryStats reflecting current allocations.
Implements Mila::Dnn::Component< TDeviceType, TPrecision >.
◆ getParameters()
|
inlineoverrideexportvirtual |
Return non-owning pointers to parameter tensors.
The returned tensor pointers remain valid for the lifetime of the component. Order should be canonical (weights before biases).
Implements Mila::Dnn::Component< TDeviceType, TPrecision >.
◆ getType()
|
inlineoverrideexportvirtual |
Get the component type identifier.
Used for serialization and runtime type identification.
- Returns
- Component type enum value.
Implements Mila::Dnn::Component< TDeviceType, TPrecision >.
◆ onBuilding()
|
inlineoverrideexportprotectedvirtual |
Hook invoked by build() to allocate component buffers.
Receives the stored BuildContext. Implementations must use config.allocationSeqLen() when sizing output buffers — this is the single call that makes Inference and Training allocate the correct buffer sizes automatically without per-component logic.
The default implementation forwards to the legacy onBuilding( const shape_t& ) overload for backwards compatibility. New components should override this overload directly.
- Note
- Do not call build() or onBuilding() from within this hook.
- Implementations should either succeed fully or leave no partial state, as a failed build() may be retried.
- Parameters
-
config Build-time configuration. Use config.allocationSeqLen() to obtain the correct output buffer sequence dimension.
Reimplemented from Mila::Dnn::Component< TDeviceType, TPrecision >.
◆ onExecutionContextSet()
|
inlineoverrideexportprotectedvirtual |
Lifecycle hook: Called immediately after ExecutionContext is set.
Override this to perform initialization that requires a valid ExecutionContext. At the time this is called, getExecutionContext() is guaranteed to return a valid context.
Common uses:
- Composite components: Create and configure child components.
- Device resource allocation: Query device capabilities.
Default implementation does nothing.
- Exceptions
-
Any exception thrown will cause setExecutionContext() to fail and restore the component to a "context not set" state.
Reimplemented from Mila::Dnn::Component< TDeviceType, TPrecision >.

◆ onTrainingModeChanging()
|
inlineoverrideexportprotectedvirtual |
Hook called before TrainingMode transitions.
Called by setTrainingMode() after validation and lock acquisition, before the internal state is updated. Derived classes override to respond to the transition — e.g. zeroing gradient buffers on transition to Eval, or re-enabling dropout on transition to Training.
The default implementation is a no-op.
- Parameters
-
mode The incoming TrainingMode.
Reimplemented from Mila::Dnn::Component< TDeviceType, TPrecision >.
◆ parameterCount()
|
inlineoverrideexportvirtual |
Return number of trainable parameters.
For leaf components this is the element count of owned parameter tensors. CompositeComponent and Network implementations should return the recursive aggregate across all children.
Implements Mila::Dnn::Component< TDeviceType, TPrecision >.
◆ prefill()
|
inlineexport |
Apply rotary position embeddings with an explicit position offset.
Each token at chunk-local position t is rotated using the cos/sin cache row at absolute position (t + position_offset). Required for chunked prefill where successive chunks use increasing offsets.
- Parameters
-
Q Query tensor [B, T, n_heads * head_dim]. Mutated in-place. K Key tensor [B, T, n_kv_heads * head_dim]. Mutated in-place. position_offset Absolute position of the first token in this chunk.

◆ save_()
|
inlineoverrideexportvirtual |
Implements Mila::Dnn::Component< TDeviceType, TPrecision >.
◆ synchronize()
|
inlineoverrideexportvirtual |
Wait for outstanding device work submitted by this component.
On CPU this may be a no-op. Use to ensure results are visible to the host or to measure synchronous timings.
Implements Mila::Dnn::Component< TDeviceType, TPrecision >.

◆ toString()
|
inlineoverrideexportvirtual |
Produce a short, human-readable description of the component.
Implementations should keep output concise and avoid throwing.
Implements Mila::Dnn::Component< TDeviceType, TPrecision >.
◆ validateBuildContext()
|
inlineexportprivate |

◆ zeroGradients()
|
inlineoverrideexportvirtual |
Clear all model-owned gradients for this component.
Default implementation is a no-op. Composite components should override to recurse to children. Leaf components should override to zero their parameter and activation gradients using device-aware helpers.
Reimplemented from Mila::Dnn::Component< TDeviceType, TPrecision >.
The documentation for this class was generated from the following file:
- /__w/Mila/Mila/Mila/Src/Dnn/Components/Encodings/Rope/Rope.ixx